Moscow, Berlin, Singapore, Washington DC, London. The radio’s are still working, but there is no one left to use them. The only confirmed safe haven is Eden-Nadir, an island off the coast of the United States of America and headquarters to Thanatos Pharmaceuticals.
Thanatos pioneered a miracle treatment, designed to be a universal cure for deadly diseases such as AIDS, Cancer. However, the best of intentions became the worst of consequences when it was released that the cure had a devastating side effect. The fungi used in the engineered cure (Ophiocordyceps unilateralis) began uncontrollably spreading through the bodies of its hosts. Upon reaching the brain, it would feed and destroy the parts responsible for cognition. Only by keeping part of the host’s brain alive, the malignant fungal infection would control it’s host with the singular interest of proliferating its noxious spores.
If you want to have access to ALL DLC cosmetics, outfits and skins in one go, then join the VIP Club for immediate access to all current and future cosmetic content in the store or from in-game events as they are released.

): Predice errores futuros basándose en la tasa de cambio, ayudando a suavizar la respuesta y reducir el sobreimpulso. 2. Ejercicio Resuelto: Diseño por Polos Dominantes
A continuación, presentamos una guía detallada con conceptos clave y para dominar el diseño de controladores PID. 1. Fundamentos del Algoritmo PID La salida de un controlador PID,
): Elimina el error en estado estacionario acumulando errores pasados. Derivativo ( Kdcap K sub d
(diferencia entre el valor deseado o setpoint y el valor medido): Corrige el error actual. Una Kpcap K sub p alta reduce el error pero puede causar oscilaciones. Integral ( Kicap K sub i
, se calcula sumando tres términos que actúan sobre el error
Dado un sistema motor-reductor con función de transferencia , se desea un tiempo de asentamiento de y un sobrepaso máximo del Solución paso a paso: Identificar parámetros deseados: Para un sobrepaso del , el coeficiente de amortiguamiento ( ) debe ser aproximadamente 0.7070.707 . Para un tiempo de asentamiento de , la frecuencia natural ( ωnomega sub n ) se calcula mediante la fórmula
Se calculan los polos deseados en el plano complejo ωnomega sub n
Este método es ideal cuando no se conoce el modelo matemático exacto de la planta. Controladores PID #1 : Teoria y ejemplos practicos.
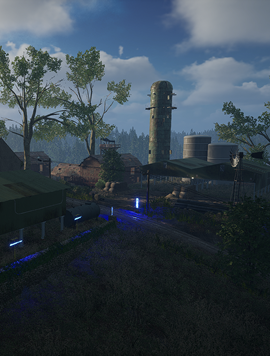
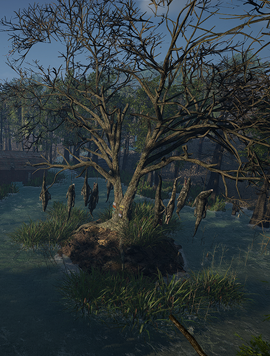
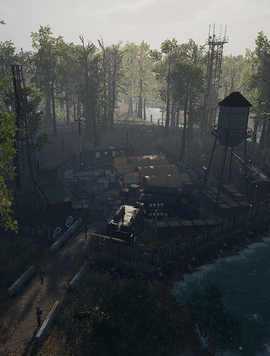
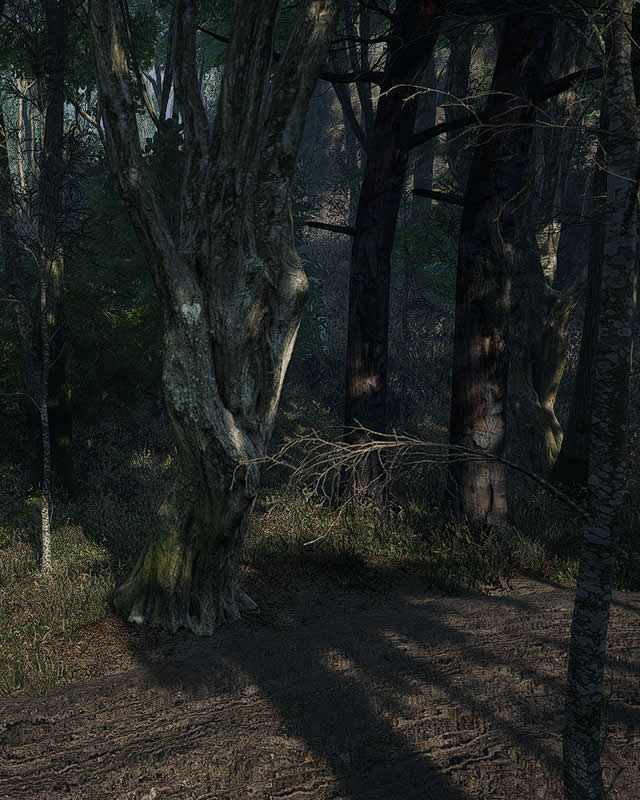
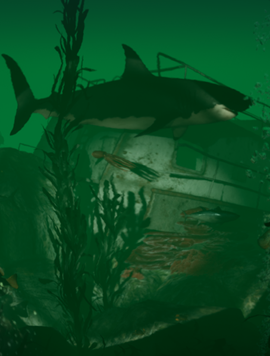
The open-world of Eden-Nadir covers a 66.95km² (41.6 mile²) area of woodlands, fields, marshlands, towns, villages and cities. This is all open for exploration and a potential place to set up camp and call home.

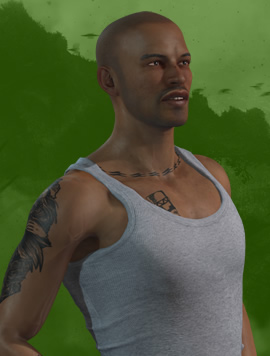





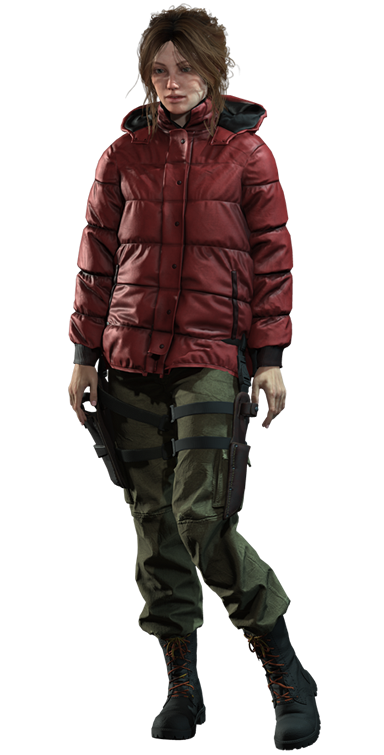
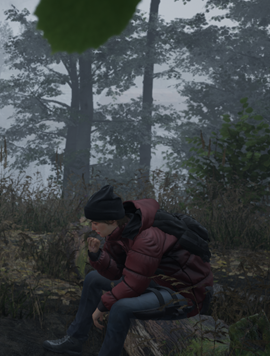
While surviving on the islands of Eden-Nadir you will come across many different people that you can interact with. Not all will be friendly and some you may have to earn their trust.
Click on the profile images to display additional information about the selected character





















Jaws of Extinction is in Early Access development right now! Take a look at what we have in the pipeline and what you can expect to see in the future.
As an indie development team, we strive to encourage all players to get involved with the active development, with ideas and feedback. You can do that by joining our Discord server where the developers are always available to chat.
Join Community
): Predice errores futuros basándose en la tasa de cambio, ayudando a suavizar la respuesta y reducir el sobreimpulso. 2. Ejercicio Resuelto: Diseño por Polos Dominantes
A continuación, presentamos una guía detallada con conceptos clave y para dominar el diseño de controladores PID. 1. Fundamentos del Algoritmo PID La salida de un controlador PID,
): Elimina el error en estado estacionario acumulando errores pasados. Derivativo ( Kdcap K sub d
(diferencia entre el valor deseado o setpoint y el valor medido): Corrige el error actual. Una Kpcap K sub p alta reduce el error pero puede causar oscilaciones. Integral ( Kicap K sub i
, se calcula sumando tres términos que actúan sobre el error
Dado un sistema motor-reductor con función de transferencia , se desea un tiempo de asentamiento de y un sobrepaso máximo del Solución paso a paso: Identificar parámetros deseados: Para un sobrepaso del , el coeficiente de amortiguamiento ( ) debe ser aproximadamente 0.7070.707 . Para un tiempo de asentamiento de , la frecuencia natural ( ωnomega sub n ) se calcula mediante la fórmula
Se calculan los polos deseados en el plano complejo ωnomega sub n
Este método es ideal cuando no se conoce el modelo matemático exacto de la planta. Controladores PID #1 : Teoria y ejemplos practicos.
Know Your Enemy Creations, taking the game further.
At KYE Creations, we contribute 1.5% of all revenue made through playjoe.gg to carbon removal, for more information
click here
![]()
2016-2026 KYE Creations. All Rights Reserved - Know Your Enemy Creations Limited (Reg: 12575078)
Developed by Know Your enemy Creations Limited. “KYE”, “KYE CREATIONS”, “Know Your Enemy”, “Jaws of Extinction” (UK00003874004) and the KYE Creations “KYE” logo are all trademarks and/or registered trademarks of Know Your Enemy Creations. All rights reserved. Published by Forthright Entertainment LLC. Jaws of Extinction © 2016 - 2026 Ryan Thirlwall, KYE Creations. All Rights Reserved.